Dive Brief:
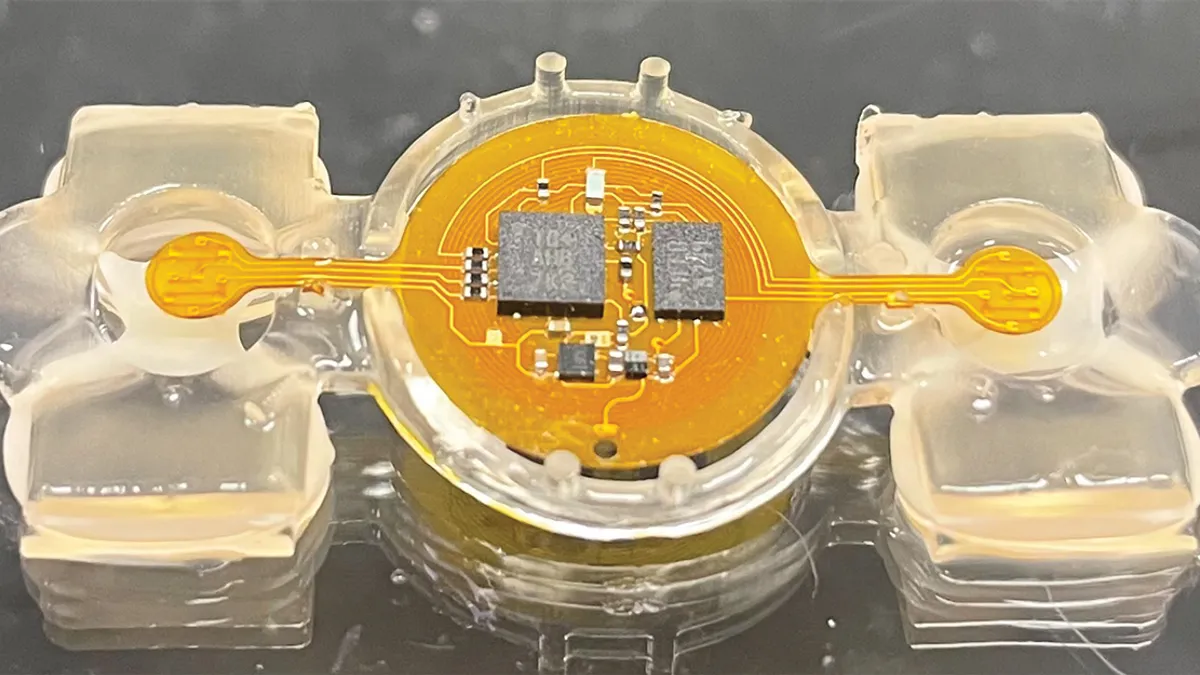
- Researchers have combined mouse muscle tissue, a 3D-printed scaffold and microelectronics to create small remote-controlled robots.
- Writing in Science Robotics, the collaborators describe the creation of centimeter-scale robots. The robots walk when LEDs stimulate light-sensitive engineered muscle and cause contractions that move polymer legs.
- The design allows the integration of sensors and other components that could eventually equip the robots to detect biomarkers of disease, carry out biopsies or perform surgery.
Dive Insight:
The paper is the culmination of more than a decade of research into biobots. Rashid Bashir, a professor at the University of Illinois Urbana-Champaign, demonstrated walking biobots in 2012 and light-activated biobots in 2016. The latest advance enables the remote control of the biobots.
Working with collaborators including the Northwestern University bioelectronics professor John Rogers, Bashir added battery-free micro-LEDs to the biobots. Sending a wireless signal causes the LEDs to light up, stimulating the muscle and driving the biobot to move forward at a speed of about 0.8 millimeters per second.
The collaborators added components including a plow to the biobots to increase their ability to manipulate the environment using the devices. More advanced components such as chemical and biological sensors could also be added to unlock new applications for the technology.
Co-first author Zhengwei Li, assistant professor of biomedical engineering at the University of Houston, outlined the potential biomedical applications of the technology in a statement.
“In developing a first-ever hybrid bioelectronic robot, we are opening the door for a new paradigm of applications for health care innovation, such as in-situ biopsies and analysis, minimum invasive surgery or even cancer detection within the human body,” Li said.
The researchers have already developed a bipedal version of the biobot. By connecting two sets of muscle actuators to microelectronics, the collaborators created a more maneuverable version of the remote-controlled device.